触覚のデータ化が切り開く
新しい形の共感と
コミュニケーション

田中 由浩
Yoshihiro Tanaka2006年東北大学大学院工学研究科博士課程修了。同年より名古屋工業大学助手、特任助教などを経て、2015年同准教授。これまでにJSTさきがけ研究者、ユトレヒト大学客員助教、藤田医科大学客員准教授などを兼任。触覚の原理や個人差に興味を持ち、質感デザインや触覚デバイス、触覚の共有や活用の研究などに従事。博士(工学)。
自分だけの触覚をどうやって伝えるか?
—田中さんは触覚の研究をどのような観点で行っているのか、教えてください。
田中:はい。もともとの話をすると、小さい頃、私はよくお腹が痛くなる子で、「この痛みはどうやったら人に伝えられるのだろう?」といったことを考えていました。人が持つ見えない世界に興味をもっていたのです。それが、現在の研究につながっているかもしれません。
お腹の痛さを他人に伝えることが難しいように、触覚はとても主観的な感覚です。そして、他の感覚に比べて個人差が大きく、人それぞれ多様であることがわかってきました。さらに、他人からは見えない感覚の世界を感じ合うことで、お互いの理解やコミュニケーション、共創が進むと考えています。このように私の触覚の研究は、主観性(Subjectivity)、多様性(Diversity)、共創(Co-Creativity)という3つがキーワードになっています。
—触覚が主観的であるとは、どのようなことによるのでしょうか?
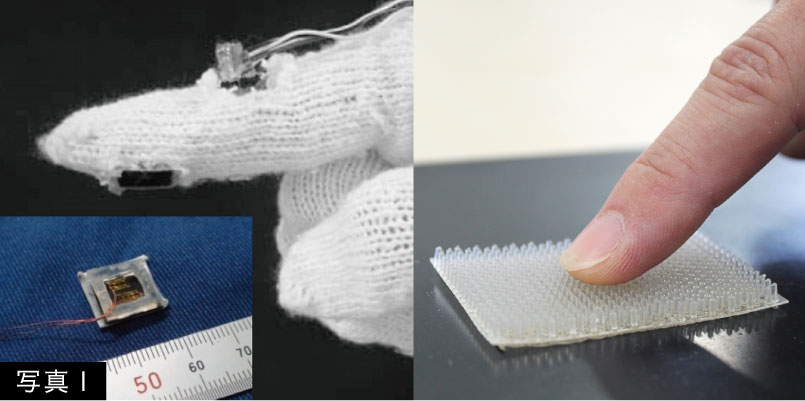
田中:私は名古屋工業大学に赴任したあと、小さな凹凸を検出するセンサーを作っていました。軍手の指先に凹凸を探るセンサーを付けたウェアラブル端末を作って現場に持っていくと、だいたいネガティブな評価が返ってくるんです。数値化しただけでは実感が伴わないからです。一方、研究室の佐野明人教授が開発した「触覚コンタクトレンズ」という、指と触れるものの間に細かい凸面のついたシートを入れて、そこで生じる力学的作用を利用して触覚の感度を増幅させるツールがあるのですが、これを現場に持ち込むと、「あそこで使える、ここで使えそう」といったポジティブな反応が返ってきました。自身で触れる実感が伴うと、納得しやすいわけです(写真1)。
私のセンサーと触覚コンタクトレンズの違いを紐解いてみると、触覚の2つの特徴が見えてきました。ひとつは自己言及性。触覚は自分の皮膚の変形によって知覚される情報で、個別の皮膚の状態によっても変わります。もうひとつは双方向性。私たちが触覚を感じるとき、うまく身体を動かしながら知覚を生じさせ、その知覚により動作を調整するというループが起こります。触覚とは、自分の皮膚や、身体の動かし方によって感じ方が異なる極めて主観的なものだということです。
—そのように個別に異なる触覚を、どのように情報化するのでしょうか?
田中:触覚は、どのような触り方をしても、自分の皮膚が振動することによって生じています。その振動を計測しようと開発したのが「ウェアラブル皮膚振動センサ」です(写真2)。この装置は、指先が何かに触れたときに起きる皮膚の微細な振動を計測し、情報化することができます。もちろん個人差はありますが、少なくともその人がそのときに感じ取っている一期一会の情報を取得することが可能になりました。触感をデジタル化できると、他人と共有できます。私の研究も、触感を人に伝えることで何ができるかということにシフトしていきました。

指先で何かに触れた際に生じる皮膚の微細な振動を計測する「ウェアラブル皮膚振動センサ」。指に巻かれたセンサーによって取得した振動データを振動子にフィードバックする。
触感を伝送して遠隔地で触診する
—触感を共有することで、どのようなことが可能になったのでしょうか?
田中:自分の触感を人に伝えることができれば、人と共同作業が可能になります。これについては現在、慶應義塾大学の南澤孝太先生とイタリア・シエナ大学のDomenicoPrattichizzo先生と共に、「Shared Haptics」という触覚共有による協調作業の研究に取り組んでいます。人は自分の左手と右手を協調して動かすことができます。例えば、目を閉じた状態でも、触覚によって左手と右手の人差し指で箱を挟んで持ち上げることができます。しかし、自分の左手と他人の右手ではうまくいきません。そこで、自分の左手の感触をもう一方の人に伝える装置を使用すると、滑りそうになったら力を入れて、触れた感触に合わせて箱を持ち上げることができました(写真3)。これは触覚を共有することで、他人の指を自分の体の一部として感じ、利用しているとも言えます。
この仕組みをロボットに適用し、人の皮膚の振動データを計測し、それに基づいてロボットアームを動かす実験を行っています。人が文字を書くのに合わせて紙がズレないようにロボットが抑えたり、人の作業のあとにロボットがすぐに次の作業を行うといった共同作業が実現できました。
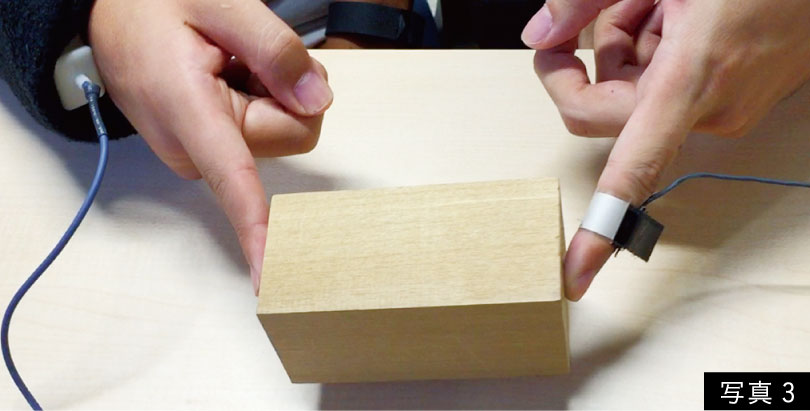
自分の指の感触をセンサーで拾って、もう一方の人に振動子で伝える装置を使用した共同作業の例。触感を共有することで、他人の指を自分の体の一部として利用している。
—こういった触感の共有を応用した例はありますか?
田中:現在、麻生リハビリテーション大学校の齊藤貴文先生と、触診を遠隔で行う「双実施型遠隔触診システム」を開発中です(写真4)。遠隔地にロボットを置いて、ロボットが触診を行うことも考えられますが、ロボットで触診の動きや感覚を再現するのはコスト的にも技術的にもハードルが高いのです。そこで、遠隔地の介護者が触診を行い、その触感を理学療法士に伝送し、理学療法士が診断することを目指しています。理学療法士がテレビ通話で介護者に指示を出し、話を聞きながら触診ができたとしても、数値のデータだけでやり取りをすると、理学療法士も実感できず納得して指示することが難しいと考えています。そこで、介護者と触感を共有して介護者の手を自分の手のように使うことで、診断できる仕組みを目指しています。

「双実施型遠隔触診システム」では、遠隔地の介護者や患者自身が指にセンサーを付けて触診を行い、その触感を理学療法士に伝送することで遠隔地での診断の実現を目指している。
—医療の分野との相性は良さそうですね。
田中:はい。ほかに、国立障害者リハビリテーションセンター研究所の河島則天先生と触覚を利用したリハビリも研究中です。触覚にはまた別の特徴があって、自分の身体認識に大きな役割を担っています。触覚は私たちの身体と外界との物理的な境界の認識に関わっています。触覚を感じることで、この手が自分のものであるという感覚(身体所有感)や、この手を動かしているのは自分であるという感覚(運動主体感)につながっています。
脳卒中などが原因で指先の感覚が鈍くなってしまうと、力の入れ具合がわからなくなり、お菓子の袋がうまく開けられないなど、手をうまく扱えなくなります。そこで感覚が鈍くなっている指にセンサーを取り付けて作業を行い、取得した振動を増幅して手の甲や肩などの感覚がある部分に与え、リハビリを行う研究を進めています(写真5)。

触覚を利用したリハビリの研究。指先の感覚を失うと指をうまく扱えないことが多いが、センサーで得た指先の触感を肩などにフィードバックすることで、力を加減することができるようになるなど、動かし方の改善が見られた。
—どのような成果がありましたか?
田中:ものに触れる際、装置を付けない状態だと感覚がわからずに指先を強く押し付けていた方が、振動のフィードバックによって触り方が柔らかくなり、加減ができるようになりました。そのあと、従来はうまくできなかった小さな積み木を積み上げるという作業が、装置を外してもできるようになりました。まだ回復までの十分な成果は見えていませんが、確実に支援にはなっていて、現在は長期的に回復の効果があるかどうかを検証中です。
茶道とイルカのジャンプ─実感から共感へ
田中:実感を共有することができた先には、共感があるのではないかと考えています。触覚情報が共有されると、そこにこれまでになかった相手への思いや一体感など、心理的にポジティブな作用があるのではないかと思い、いろいろな研究者の方と取り組みを始めています。
—具体的な取り組みを教えてください。
田中:そのうちのひとつに「茶道の共有」があります。TMCNの金子真弓さん、ロフトワークの小原和也さん、木下浩佑さんにお声がけいただき、茶人の松村宗亮さんのご協力で実現しました。茶人の松村さんの指にセンサーを取り付け、見ている人たちは指にリング型の振動子を付けて、お茶を点てる一連の所作を触覚で体感します(写真6)。茶人が茶道具を清める所作や、触った茶器のテクスチャー、そしてお茶を点てる振動が伝わり、所作を見て待つお客さんから、茶人と一緒にお茶を点てている感覚がしたなどの感想をいただきました。
また、いおワールドかごしま水族館に協力してもらって、イルカのジャンプの触感を体験する実験も行いました(写真7)。イルカのジャンプには、水面に真横からぶつかる方法と、頭から飛び込む方法があって、着水時の振動が全然違うんです。私の振動センサーは非常に感度が高く水槽の壁面の揺れが拾えるので、センサーを水槽に設置して、無線を介して大勢の観客が持っている振動子に伝送し、みんなでジャンプの違いなどを体感しました。ジャンプが弱いと、「このイルカはちょっと元気がなくなってきたのかな」と感じたり、これまでにない観覧の体験になりました。見ると同時に、イルカと一体化していくような感覚です。
できず納得して指示することが難しいと考えています。そこで、介護者と触感を共有して介護者の手を自分の手のように使うことで、診断できる仕組みを目指しています。
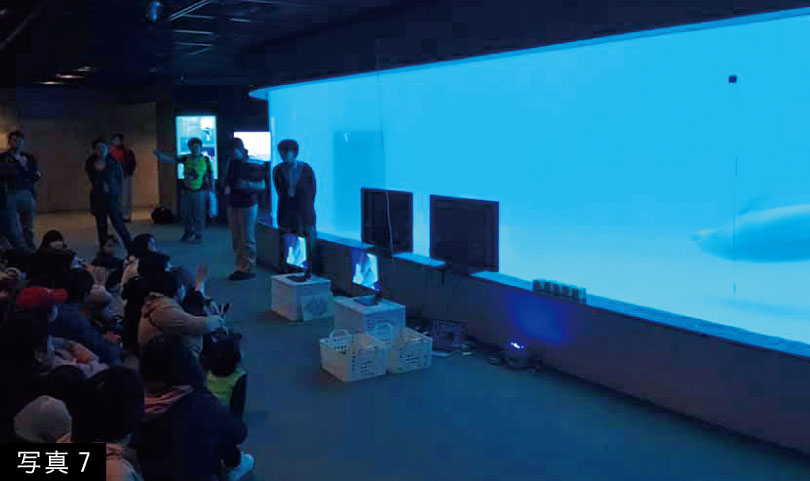
茶人の指にセンサーを付け、振動子で一連の所作の触感を共有する茶道の共有(写真6)と、水槽にセンサーを取り付けてその振動でイルカのジャンプを体験する実験(写真7)。触感の共有から、相手への思いや一体感といった共感へと研究は進み、触覚による新しいコミュニケーションの形を模索している。
—これらの研究を通して、触覚のコミュニケーションにはどのような未来があると感じていますか?
田中:触覚の場合、コミュニケーションと言いつつも、どちらかというと「一体化していく」という触覚特有の方法だと言えます。二人称ではなく一人称になっていく感覚で、そこが一般的な会話のコミュニケーションとは違うところですね。それは、「見る、聞く」という従来のコミュニケーションとは異なる、まったく新しいものです。そこには、テクニカルなこと以外に、感覚を共有することに対する倫理的な面であったりと、新しい議論も必要になってくると思います。テクノロジーによって実現していく触覚のコミュニケーションは、単なるやり取りというところにとどまらず、人そのものをアップデートしていくものだと感じています。